
Tsukuba Area Technical Tour
Tuesday, September 20
9:30 Roll call & Departure from Tsukuba International Congress Center (TICC)
10:00 AIST Tour
12:00 Lunch
13:30 University of Tsukuba Tour
16:30 Arrive at TICC & Breakup
Fee: JPY4,000 (lunch included)
Details of Visiting Research Laboratories
CNRS-AIST JRL (Joint Robotics Laboratory), UMI3218/RL
CNRS-AIST JRL (Joint Robotics Laboratory), UMI3218/RL is a joint laboratory established between a French public organization CNRS (Centre National de la Recherche Scientifique) and AIST and located in Department of Information Technology and Human Factors of the AIST at Tsukuba. The researchers from both countries are closely collaborating to pursue means of increasing robot’s functional autonomy and interactivity, especially using the humanoid platform.
The main research subjects include: task and motion planning and control, multimodal interaction with human and surrounding environment through perception, and cognitive robotics. We also a humanoid robot that can reproduce various human behaviors to serve as an evaluator of products such as assistive devices, by estimating the mechanical effects in a quantitative manner, which is difficult with human measurement. The JRL is actively conducting international collaborative research with French CNRS laboratories and also with research institutes through international research projects including EU projects.
In the technical tour, we will present research activities on humanoid robotics using HRP-2 and HRP-4.
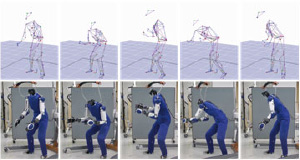
Humanoid robot mimicking human motion
Smart Mobility Research Group
“Autonomous Wheelchair and Mobility Robot Sharing System”
Our autonomous wheelchair, equipped two range sensors, can automatically trace the route which has passed through once. During the automatic traveling, it can stop or avoid collision with pedestrians safety and automatically.
We are developing the mobility robot sharing system, which includes reservation system via WEB, user interface, and operation data accumulation, etc., for effective urban traffic planning by mobility robots.


Robotic Wheelchair with Autonomous Traveling Capability (left) & Energy Charge Station for Mobility Robots (Central Park in Tsukuba City) (right)
Manipulation Research Group
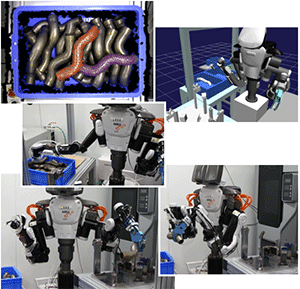
“Bin-picking system by a dual-arm manipulator”
We are developing some intelligent manipulation system for Factory Automation.
In the technical tour, we will demonstrate a robot system picking up a part randomly stored in a box and setting it to a fixture.
NMIJ, AIST Mechanical Metrology Laboratories
“Introduction of national Force, Torque, and Pressure standards”
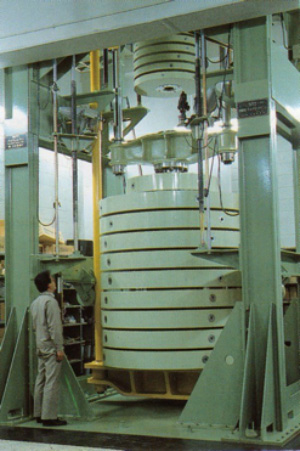

(Left) 540 kN deadweight type force standard machine for the national force standard
(Right) Large controlled-clearance pressure balance for the national hydraulic pressure standard up to 1 GPa
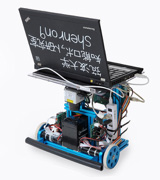
- Intelligent Robot Laboratory (Prof. Takashi Tsubouchi)
This laboratory pursues research and development of mobile robots and their technologies, together with their industrial applications. The robots are named Yamabico as a family name. They run in indoor / outdoor environment using visions and/or laser scanners autonomously.
 (c) Kodansha
(c) Kodansha
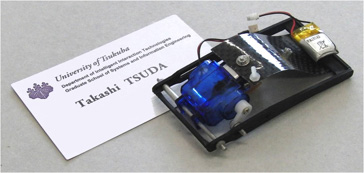
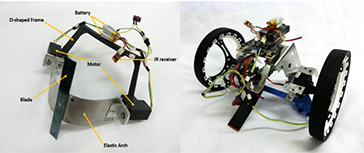
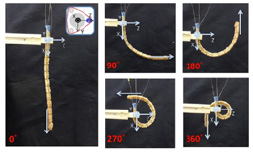
- “Flexible Robot”-tics Laboratory (Prof. Hiromi Mochiyama)
1. Jumping Mechanisms and Robots based on Snap-through Buckling of Closed Elastica (left: ‘Kikker’ - a card-size 14[g] jumping mechanism, center: ‘LJ’ - a compact jumping mechanism, right: Two-wheeled LJ for jumping with running)
2. Continuum Manipulator with Rubber Skin Layer including Pulling-wire Mechanism (left) and 3. Mechatronics-sandwiched Rubber Artificial Skin Layer (right)

- Artificial Intelligence Laboratory & Center for Cybernics Research (Prof. Kenji Suzuki)
In this laboratory, we have been conducting a number of research and development in key technologies and systems for wearable Robots and interface, in particular Artificial Intelligence and Cybernics technologies for assisting and empowering people. Some wheelchair type robots are presented in this demonstration. Cybernics is an interdisciplinary academic field of human-assistive technology to enhance, strengthen, and support limited cognitive and physical capabilities.



- Core Laboratory for Algal Biomass and Energy System
Algael biomass, with its high rate of biomassenergy -production, is expected to be the next-generation bio-energy source. Developing the technology for large-scale outdoor cultivationuring for of the algaeproduction of biomass has therefore become necessary. This project aims to establish such large-scale outdoor cultivationuring technology by utilizing the abandoned arable land in the City of Tsukuba. The project will also includes carry out experimental works on the practical uses of algael biomass in, for example, automobile fuel, operation and in the development of high valued productsadded algae industries, such as healthy foods and pharmaceuticals.

Algae mass cultivation field
- Large Space in Empowerment Studio
Large Space, the world’s largest virtual reality system, can be described as the greatest research attractor in the Empowerment Studio. It is a large experimental module equipped with features including motion capture and motion base equipment, capable of projecting three-dimensional images on all surrounding walls and the floor, enabling experiments such as measuring the motions of people and things in wide-open spaces and generating feelings of motion and movement in a virtual world.

Social Event Co-Chairs
Hiroaki Yano (Univ. of Tsukuba)
Takeshi Sakaguchi (AIST)
Deadline of Proposal of Workshops and Tutorials (extended)
Deadline of Proposal of Organized Sessions (extended)
Deadline of Submission for Regular Papers(extended) and Position Papers (4/22)
Notification of Paper Acceptance (July 1, 2016: Submission of Final Camera-ready Papers)